Mikael Rosenqvist

Projekttid: 2020 – 2022
Budget: 12 150 000 kronor
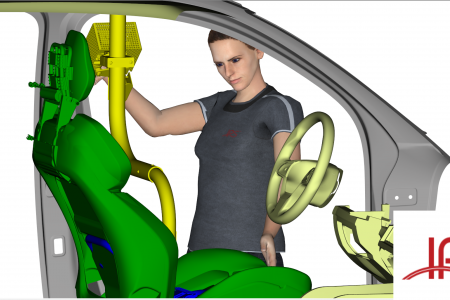
Använda en manikin för att simulera manuella monteringsoperationer för att uppnå bättre geometrisk kvalitet
Målet med projektet är att med hjälp av en manikin analytiskt bestämma komplexitetsnivån för manuella monteringsoperationer för att uppnå bättre geometrisk kvalitet. Projektet avser att ta traditionellt mjuka värden och omvandla dessa till hårda tal och fakta som går att proaktivt införliva i nya produkter och system.
Nyheten är att koppla ihop två forskningsspår till ett. I det ena spåret har grunderna för kopplingen mellan monteringsergonomi och geometrisk kvalitet utforskats samt att bedömningskriterier för monteringsergonomisk komplexitet har tagits fram och implementerats i ett CAT-verktyg. I det andra spåret har en biomekanisk modell av människan utvecklats för att virtuellt kunna modellera, simulera och optimera en operatörs rörelser vid montering.
Syftet är att ta fram en helhetslösning som möjliggör att kunna simulera och proaktivt prediktera en systemlösning med avseende på både produktens kvalitet och montörens förutsättningar och arbetsmiljö. I tillägg till detta kommer en helt ny unik metodik att utvecklas där man överför avvikelser från produkten till monterings-simuleringen och simulerar hur dessa påverkar operatörens arbetsmiljö.
Vinnova dnr: 2019-03111
RECO ger ny kunskap och metoder för förbättrad kvalitet i kompositmaterial genom att hantera geometrisk variation
2021 – 2024
The project's goal is to assist industry enabling sustainable work for operators during assembly of wire harnesses.
2022 – 2025

Projektet kommer att utveckla en demonstrator av ett ergonomisimuleringsverktyg som inkluderar mänsklig mångfald och kan användas för design, optimering, visualisering och verifiering av fordonsmonteringsstationer.
2019 – 2022
Bättre arbetsinstruktioner för effektivare och mer inkluderande arbete
2022 – 2025
Utveckling av en övergripande modell för säker installation av samverkande robotar
2016 – 2018
Tidsättning av manuell montering är centralt för verkstadsindustrins konkurrenskraft.
2021 – 2024

Unika metoder, tekniker och mjukvara för simulering av elektrodeposition och galvanisering.
2020 – 2023

